












🎯🔧 FSR402 Long Tail – Medí lo invisible con calidad certificada
¿Buscás medir fuerza con precisión sin sacrificar espacio ni durabilidad? El FSR402 Long Tail es tu mejor aliado. Detectá contacto humano, presión mecánica, peso y tacto con un diseño tan delgado que se integra en casi cualquier estructura: desde un asiento inteligente hasta un dedo robótico.
Su área activa de 14.7 mm, respuesta rápida y salida analógica lo hacen perfecto para leer gradualmente cuánto se presiona, no solo si se presiona. Su diseño con cola larga evita daños en la conexión, ideal para prototipos y productos finales de alto nivel.
🥇 Frente a sensores baratos:
-
El FSR402 no pierde lectura con el tiempo
-
Soporta mejor el calor y la humedad
-
Tiene una variabilidad entre sensores menor (±2-6%)
-
No se desintegra ni se despega
No es solo un componente, es una extensión sensorial de tus ideas.
💖 3. ¿Qué tipo de deseos cumple este producto? (5 ejemplos vívidos)
-
Crear un dispositivo que sienta como un ser humano: ideal para prótesis o manos robóticas.
-
Detectar presencia o postura sin cámaras: como en sillas inteligentes o camas hospitalarias.
-
Tener medición precisa y analógica: no solo un clic ON/OFF.
-
Integrarse en estructuras delgadas y flexibles sin que se note.
-
Ahorrar tiempo de diseño y conexión con su versión de “cola larga” ya preparada para proyectos.
🧩 4. 5 ejemplos de casos reales donde fue útil
-
Hospital privado en La Paz: instalaron sensores FSR402 en camas para monitoreo de presión en pacientes en terapia intensiva.
-
Startup en Santa Cruz: desarrolló una plantilla inteligente para deportistas, detectando distribución de peso durante el trote.
-
Centro de robótica educativa en Cochabamba: utilizó el FSR402 en dedos robóticos que ajustan su fuerza según el objeto.
-
AgroTech en Tarija: integró el sensor en brazos robóticos recolectores para evitar aplastar frutas.
-
Docente en Sucre: enseñó principios de electrónica analógica utilizando el FSR402 en interfaces sensibles al tacto.
| Característica | Valor |
|---|---|
| Modelo | FSR402 Long Tail (FSR400 Series) |
| Área activa | Ø 14.7 mm |
| Grosor | 0.45 mm |
| Rango de detección | 0.1 N a 20 N (dependiendo del circuito) |
| Resistencia sin presión | > 10 MΩ |
| Resistencia con presión | ~200 Ω a 1 kΩ |
| Tiempo de respuesta | < 3 µs |
| Repetibilidad | ±2-6 % |
| Durabilidad | 10 millones de ciclos (bajo carga moderada) |
| Material | PTF sobre polímero flexible + cola larga reforzada |
| Temperatura de operación | −30 °C a +60 °C |
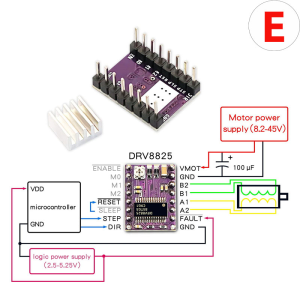
🔧 8. Paso a paso de instalación o uso
-
Preparación: asegurate de tener un microcontrolador (Arduino, ESP, etc.) y una resistencia de 10kΩ para formar un divisor de voltaje.
-
Conexión:
-
Terminal 1 del FSR al pin analógico del microcontrolador
-
Terminal 2 a GND
-
Colocá la resistencia de 10kΩ entre VCC (3.3 V o 5 V) y la línea del FSR
-
-
Montaje: fijá el sensor en la superficie deseada. Que quede plano y sin tensiones.
-
Lectura: usá
analogRead()para capturar el voltaje y convertirlo en presión. -
Calibración: medí fuerzas conocidas (con pesas pequeñas) y correlacioná valores.
-
Validación: verificá estabilidad y repetibilidad, evitando torcer la “cola”.
-
Producción: fijá con cinta doble faz o en cápsula protectora. No exponer a humedad.




Valoraciones
No hay valoraciones aún.